

 联系我们
联系我们

库卡机器人KR 3 R540,库卡机器人KR 4 AGILUS,库卡机器人KR 4 R600,库卡机器人KR 6 R900-2,库卡机器人KR 10 R1100,库卡机器人KR 10 R1420,库卡机器人KR 16 R1610-2,库卡机器人KR 20 R1810,库卡机器人KR 20 R2100,库卡机器人KR 70 R2100-2,库卡机器人KR 210 R2700-2,库卡机器人KR 360 R2830,库卡机器人KR 500 R2830,库卡机器人KR 120 R3200 PA,库卡机器人KR 180 R3200 PA,库卡机器人KR 240 PA,库卡机器人KR 470-2 PA等。
库卡机器人代理,具体供应的服务范围有:
库卡机器人|库卡工业机器人|库卡机械臂|库卡机器人项目|库卡机器人配件|机器人配件|库卡机器人备件|库卡机器人示教器|机器人控制柜|库卡机器人维保|库卡机器人售后服务|库卡机器人技术支持|管线包等。
具体分下面 4 个步骤:
一、硬件准备 / Hardware
KUKA KR C4 控制器
BECKHOFF 耦合模块 EK1100( EtherCAT )
BECKHOFF 输入模块 EL1809(16 个点数字量 )
BECKHOFF 输出模块 EL2809(16 个点数字量 )
注:全文提到的 BECKHOFF 是 “倍福” ***。
二、软件准备 / Software
与控制器相对应的 WorkVisual 软件 (随机光盘)
三、硬件连接 / Connection
在软件模块配置之前,下面我们首先为大家介绍一下如何安装接线:
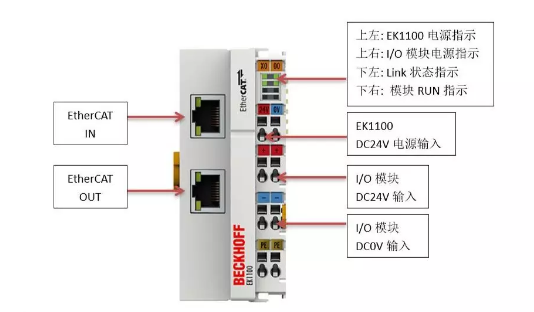
将 CCU 上的 X44 接入 EK1100 的 EtherCAT IN 口。
EK1100 的四个指示灯(图上绿色区域),上面的两个常亮,下面的
电源端的接线用小螺丝刀(一字或十字)插入方孔中,斜向下拨压,将导线插入圆孔中,再将小螺丝刀释放取出,导线被压牢。
注意:EK1100 上方的 24V / 0V 是给 EK1100 自身供电的,而下方的 + / - 是给后续模块的输入/输出端子供电的,都需要接线。
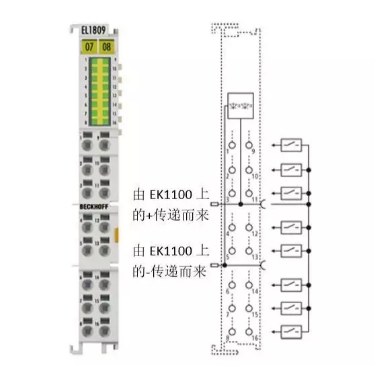
输入回路需要与电源正极连接,故传感器或开关的一端接 EL1809 上的 16 个端子任意一个,另一端接EK1100 上的 + 。
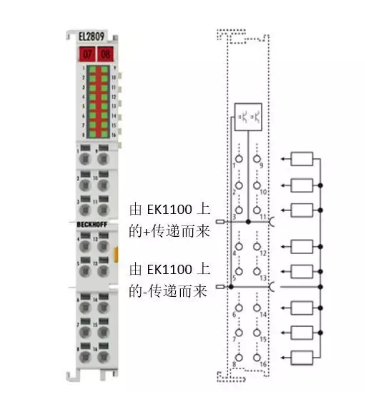
输出回路需要与电源负极连接,故负载的一端接 EL2809 上的 16 个端子任意一个,另一端接EK1100 上的 。
四、软件配置 / Configuration
1. 导入模块设备说明文件(简称 ESI )文件
从 BECKHOFF 官网下载相关模块设备说明文件( ESI )。打开 WorkVisual 软件,菜单 File /

了解更多库卡机器人