

 联系我们
联系我们

库卡机器人代理,具体供应的服务范围有:
库卡机器人|库卡工业机器人|库卡机械臂|库卡机器人项目|库卡机器人配件|机器人配件|库卡机器人备件|库卡机器人示教器|机器人控制柜|库卡机器人维保|库卡机器人售后服务|库卡机器人技术支持|管线包等。

10.1 机器人的程序结构和组成
程序流程控制
除了纯运动指令和通讯指令(切换和等待功能)之外,在机器人程序中还有大量用于控制程序流程的程序。 其中包括:
循环 | 循环是控制结构。 它不断重复执行指令块指令,直至出现终止条件。
无限循环
计数循环
当型和直到型循环
分支 | 使用分支后,便可以只在特定的条件下执行程序段。
条件分支
多分支结构
无限循环 :在无限循环中无止境地重复指令段。 然而,却可通过一个提前出现的中断(含 EXIT 功能)退出循环语句。
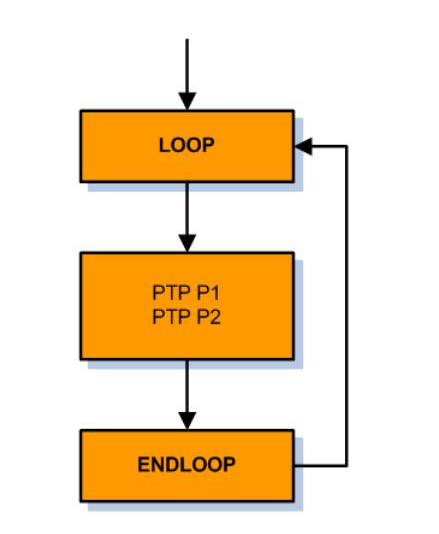
程序流程图: 无限循环
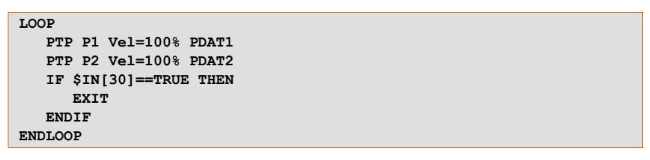
LOOP 指令举例:
无 EXIT:***执行对 P1 和 P2 的运动指令

带 EXIT:一直执行对 P1 和 P2 的运动指令,直到输入端 30 切换到 TRUE。
计数循环 :用计数循环 (FOR 循环语句)可使指令重复定义的次数。 循环的次数借助于一个计数变量控制。
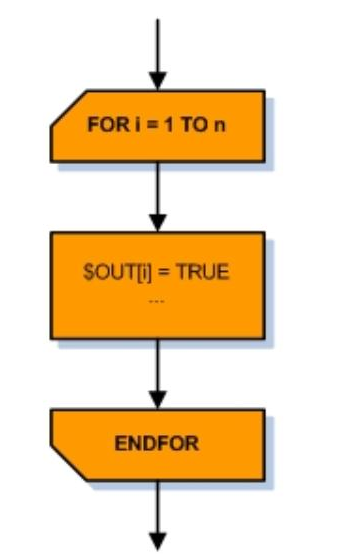
程序流程图: FOR 循环语句
一个 FOR 循环语句举例: 将输出端 1 至 5 依次切换到 TRUE。 用整数(Integer) 变量 “i” 来对一个循环语句内的循环进行计数。

当型循环: WHILE 循环是一种当型或者先判断型循环,这种循环会在执行循环的指令部分前先判断终止条件是否成立。
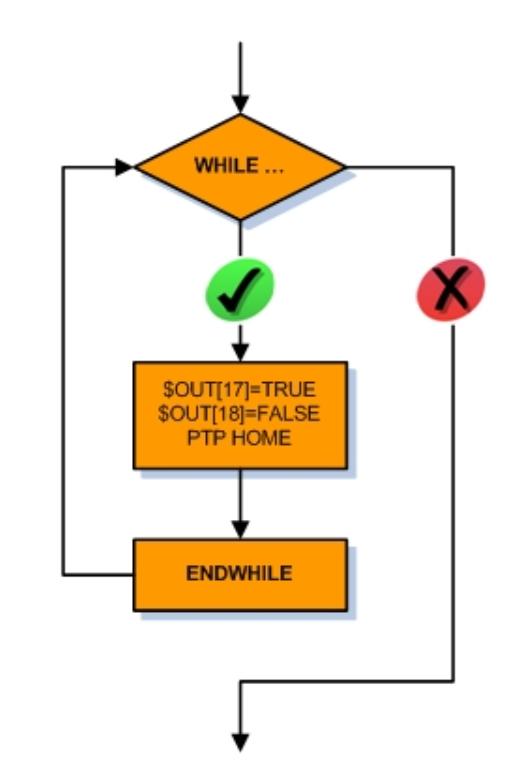
WHILE 程序流程图
了解更多库卡机器人