

 СЊЯЕЮвУЧ
СЊЯЕЮвУЧ

ПтПЈЛњЦїШЫДњРэЃЌОпЬхЙЉгІЕФЗўЮёЗЖЮЇгаЃК
ПтПЈЛњЦїШЫ|ПтПЈЙЄвЕЛњЦїШЫ|ПтПЈЛњаЕБл|ПтПЈЛњЦїШЫЯюФП|ПтПЈЛњЦїШЫХфМў|ЛњЦїШЫХфМў|ПтПЈЛњЦїШЫБИМў|ПтПЈЛњЦїШЫЪОНЬЦї|ЛњЦїШЫПижЦЙё|ПтПЈЛњЦїШЫЮЌБЃ|ПтПЈЛњЦїШЫЪлКѓЗўЮё|ПтПЈЛњЦїШЫММЪѕжЇГж|ЙмЯпАќЕШЁЃ
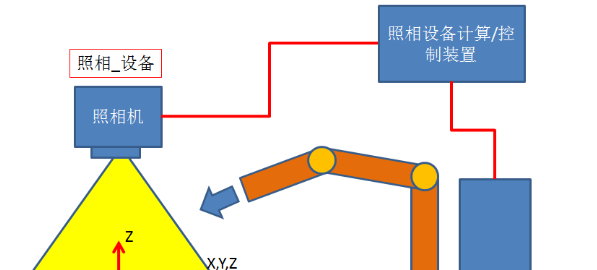
ЪзЯШвЊНЈСЂЛњЦїШЫЕФЙьМЃ,зїЮЊЛљДЁЛњЦїШЫБрГЬЙьМЃ.
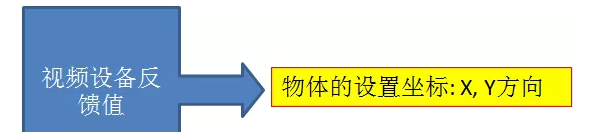
ЪгОѕзЅШЁжївЊЪЧЭЈЙ§ИФБфЛњЦїШЫЕФTOOLзјБъЯЕЛђBASEзјБъЯЕРДЪЕЯжЕФ.
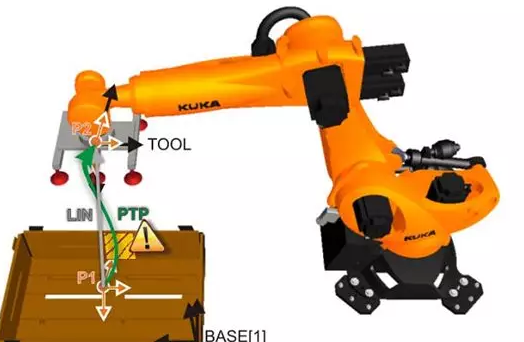

ЮяЬхЮЛжУЕФБфЛЏжївЊЪЧЫќЮЛжУЕФX,Y,Z ЗНЯђЕФБфЛЏ.
BASEзјБъЯЕ: ПЩИљОнашвЊЖЈвхгУЛЇзјБъЯЕЁЃ ЕБЛњЦїШЫХфБИЖрИіЙЄзїЬЈЪБЃЌбЁдёгУЛЇзјБъЯЕПЩЪЙВйзїИќЮЊМђЕЅ ЁЃдкгУЛЇзјБъЯЕжаЃЌ TCP ЕуНЋбигУЛЇздЖЈвхЕФзјБъжсЗНЯђдЫЖЏЁЃ
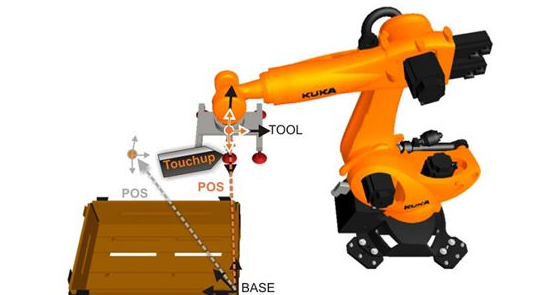
вдИФБфBASE зјБъЯЕЮЊР§:
СЫНтИќЖрПтПЈЛњЦїШЫ