

 联系我们
联系我们

装备并选用外部主动运转
装备并选用外部主动运转
库卡机器人KR 3 R540,库卡机器人KR 4 AGILUS,库卡机器人KR 4 R600,库卡机器人KR 6 R900-2,库卡机器人KR 10 R1100,库卡机器人KR 10 R1420,库卡机器人KR 16 R1610-2,库卡机器人KR 20 R1810,库卡机器人KR 20 R2100,库卡机器人KR 70 R2100-2,库卡机器人KR 210 R2700-2,库卡机器人KR 360 R2830,库卡机器人KR 500 R2830,库卡机器人KR 120 R3200 PA,库卡机器人KR 180 R3200 PA,库卡机器人KR 240 PA,库卡机器人KR 470-2 PA等。
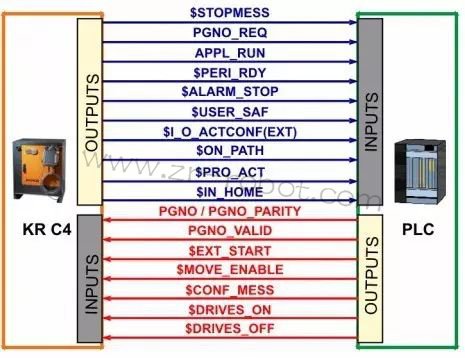
1.通过外部主动运转接口可用上级控制器(例如用一个PLC)来控制机器人进程
2.上级控制系统通过外部主动运转接口向机器人控制系统宣布机器人进程的相关信号 (如运转答应、毛病承认、程序发动等)。 机器人控制系统向上级控制系统发送有关运转状态和毛病状态的信息。
为了能够使用外部主动运转接口,有必要进行下列装备:
1. 装备CELL.SRC程序
2. 装备外部主动运转接口的输入/输出端
输入端 (从机器人控制器的角度)
PGNO_TYPE - 程序号类型
此变量确认了以何种格局来读取上级控制系统传送的程序编号。
如下表进行阐明:
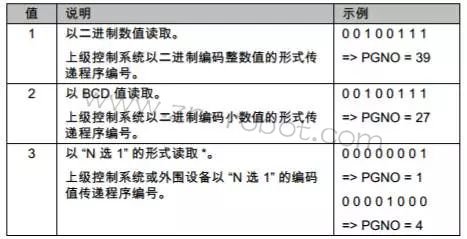
备注:选用这种传递格局时,未对 PGNO_REQ、PGNO_PARITY 以及
PGNO_VALID 的值进行分析,因此无意义。
PGNO_LENGTH - 程序号长度
了解更多库卡机器人
1.通过外部主动运转接口可用上级控制器(例如用一个PLC)来控制机器人进程
2.上级控制系统通过外部主动运转接口向机器人控制系统宣布机器人进程的相关信号 (如运转答应、毛病承认、程序发动等)。 机器人控制系统向上级控制系统发送有关运转状态和毛病状态的信息。
为了能够使用外部主动运转接口,有必要进行下列装备:
1. 装备CELL.SRC程序
2. 装备外部主动运转接口的输入/输出端
输入端 (从机器人控制器的角度)
PGNO_TYPE - 程序号类型
此变量确认了以何种格局来读取上级控制系统传送的程序编号。
如下表进行阐明:
备注:选用这种传递格局时,未对 PGNO_REQ、PGNO_PARITY 以及
PGNO_VALID 的值进行分析,因此无意义。
PGNO_LENGTH - 程序号长度
了解更多库卡机器人